ロボット趣味の世界ではあまり注目されてないのですが、個人的にはとても大事に思っている『タミやん』の進捗状況です。
ええ、忘れちゃいなかったんですよ。いろいろ忙しくて手が着いていませんでしたが。
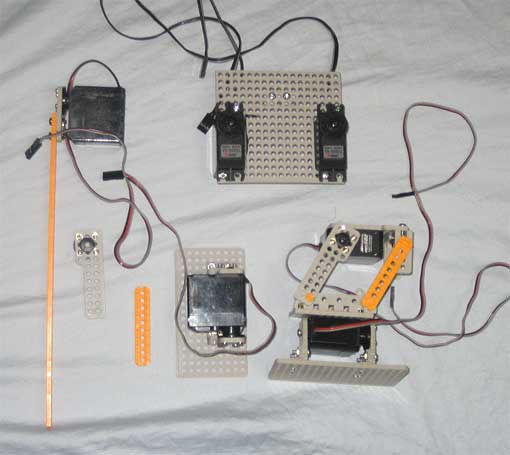
今のところの作業状況は画像の通りです。
画像の足の各サーボは、サーボホーンの固定はされていますが、板材との固定(両面テープによる)はされていません。接着している風に置いてあるだけです。
しかし、ここまで組んだ段階で、リンク式の大腿ピッチ軸の可動範囲が最初に想像してたより大きく取れたので、大腿ヨー軸なくても歩ける気がしてきて、急遽設計変更することにしました。
設計図なんてものは描かずに行き当たりばったりに作業しているのが丸見えですね(笑)
しかしこれで2軸減って、製作予算が10000円も安くなりました。こいつのコンセプト的には安いのはいいこと。
フレームの加工が誰でもできるように……というのがコンセプトの一つだったのですが、足裏の皿ビス加工は誰でもというわけにはいきませんねぇ。
なかなか「特別な工具無しで誰にでも簡単に加工できる」というのは難しいモノです。
| https://blog.tsuduki.com/index.php?e=77 |
|
ロボット | 11:19 PM |
comments (0) | trackback (x) |




